Research Interests
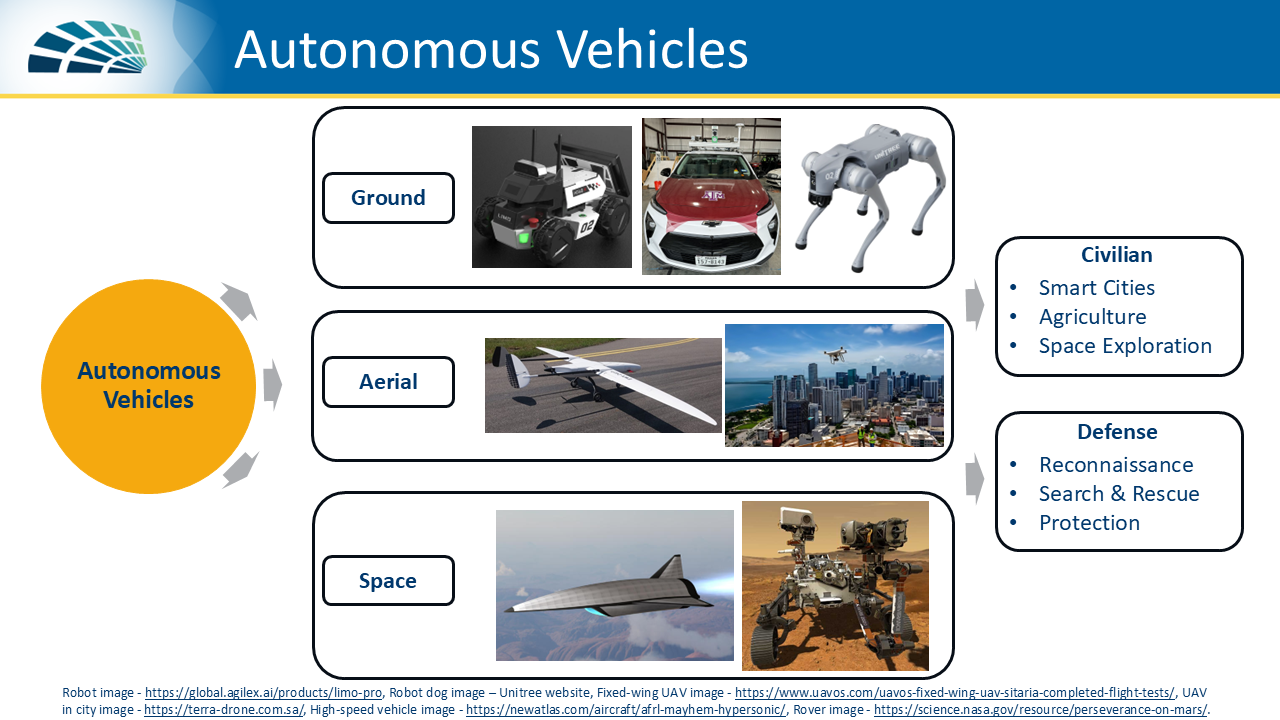
My research focuses on autonomous vehicles and robotics. I am fascinated to work with them since they have applications in various domains such as in ground, air, and space. Furthermore, depending on the application, different vehicles must be used. I am excited to work with a variety of such vehicles since they find applications in civilian and defense fronts.
For autonomous vehicles to successfully accomplish their mission, various key research areas are needed. My research focuses on four key areas.
- Trajectory planning - The goal is to determine the optimal path connecting given initial and final configurations subject to constraints such as minimum turning radius constraints.
- Task allocation - For many autonomous vehicle missions, multiple agents are required. Task allocation is essential to distribute tasks to each agent and plan their path to optimally accomplish the given mission.
- Experiments - Essential for algorithms for autonomous vehicles is for it to be implementable on hardware. Hence, experiments is an essential focus of my research.
- Safe physical AI - With the substantial increase in the amount of data available and computational resources in terms of GPUs, ML algorithms are finding increasing applications since they can be trained using these resources. However, they lack the desired safety guarantees, which is essential for autonomous vehicles and robots. My research focuses on merging the benefits offered by model-based algorithms in this regard with novel ML algorithms to provide agents with ability to generalize and perform effectively and safely in apriori unknown environments.
A summary of the applications and my areas of interest are given in the following slides.
Selected Publications
2026
- Heterogeneous Min-Max Multi-Vehicle Multi-Depot Traveling Salesman Problem: Heuristics and Computational ResultsDeepak Prakash Kumar, S. Rathinam, S. Darbha, T. Bihl—Under preparation
- A Novel Model for 3D Motion Planning for a Generalized Dubins Vehicle with Pitch and Yaw Rate ConstraintsDeepak Prakash Kumar, S. Darbha, S. G. Manyam, D. W. CasbeerIEEE Transactions on RoboticsAccepted
- Time-optimal Convexified Reeds-Shepp Paths on a SphereS. Li, Deepak Prakash Kumar, S. Darbha, Y. ZhouIEEE Transactions on RoboticsAccepted
- A New Approach to Motion Planning in 3D for a Dubins Vehicle: Special Case on a SphereDeepak Prakash Kumar, S. Darbha, S. G. Manyam, D. W. CasbeerIEEE Transactions on Robotics
2025
- A Path Planning Algorithm for a Hybrid UAV Traveling in Noise Restricted ZonesS. Belgaonkar, Deepak Prakash Kumar, S. Rathinam, S. Darbha, T. BihlIEEE Transactions on Aerospace and Electronic Systems
- Equivalence of Dubins Path on Sphere with Geographic Coordinates and Moving FramesDeepak Prakash Kumar, S. Darbha, S. G. Manyam, D. W. Casbeer, M. PachterAIAA Journal of Guidance, Control, and Dynamics
2024
- Generalization of Optimal Geodesic Curvature Constrained Dubins’ Path on Sphere with Free Terminal OrientationDeepak Prakash Kumar, S. Darbha, S. G. Manyam, D. W. CasbeerIEEE Control Systems Letters
- UAV Routing for Enhancing the Performance of a Classifier-in-the-loopDeepak Prakash Kumar, P. Rajbhandari, L. McGuire, S. Darbha, D. SofgeJournal of Intelligent & Robotic Systems
- Heuristic for Min-Max Heterogeneous Multi-Vehicle Multi-Depot Traveling Salesman ProblemDeepak Prakash Kumar, S. Rathinam, S. Darbha, T. BihlAIAA SciTech ForumPresented
- Minimum-Cost Routing of two UAVs with Communication ConstraintsK. N. Moorthy, Deepak Prakash Kumar, S. Darbha, S. Rathinam, T. BihlAIAA SciTech ForumPresented
2023
- Optimal Geodesic Curvature Constrained Dubins’ Path on Sphere with Free Terminal OrientationDeepak Prakash Kumar, S. Darbha, S. G. Manyam, D. Tran, D. W. CasbeerIEEE Indian Control ConferencePresented
- The Weighted Markov-Dubins ProblemDeepak Prakash Kumar, S. Darbha, S. G. Manyam, D. CasbeerIEEE Robotics and Automation Letters
2022
- Performance evaluation and optimization of design parameters for electric vehicle-sharing platforms by considering vehicle dynamicsV. Bansal, Deepak Prakash Kumar, D. Roy, S. C. SubramanianTransportation Research Part E
- Model-Based Toe Misalignment Detection in Single-Unit Twin-Axle TrucksR. Grandhe*, Deepak Prakash Kumar*, A. Mukhopadhyay, M. Sharma, S. C. SubramanianIEEE ITSC
2019
- Design and Evaluation of a Coupled Motor Drive Powertrain for an Electric BusDeepak Prakash Kumar, S. Gupta, S. Suriyamoorthy, S. C. Subramanian, S. Gowrisankar, D. S. Kumar, R. S. Murugan, P. H. LathaIEEE ITEC IndiaPresented
- Impact of Varying Test Conditions in Standards for Electric Bus Powertrain SizingS. Gupta, Deepak Prakash Kumar, S. Suriyamoorthy, S. C. Subramanian, S. Gowrisankar, D. S. Kumar, R. S. Murugan, P. H. LathaIEEE ITEC India
- Parametric Evaluation of Ride Comfort and Traction Stability of Hub Motor Driven Electric TrucksS. Suriyamoorthy, S. Gupta, Deepak Prakash Kumar, S. C. SubramanianIEEE ITEC India
- Design of a Dynamic Brake Force Regulation Strategy for Heavy Commercial Road VehiclesDeepak Prakash Kumar, S. Gupta, S. Suriyamoorthy, S. C. SubramanianIEEE TENCONPresented
- Analysis of Hub Motor Configuration and Battery Placement on Ride Comfort of Electric TrucksS. Suriyamoorthy, S. Gupta, Deepak Prakash Kumar, S. C. SubramanianIEEE Vehicle Power and Propulsion Conference (VPPC)